Copyright
© 2000-2015
LHERBAUDIERE
8 pages à l'impression

version
initiale 2002
dernière
mise à jour
22 mars 2013
22 mars 2013
| |
Copyright |
8 pages à l'impression |
|
version
initiale 2002 |
|
| dernière
mise à jour 22 mars 2013 |
CAPTEURS pour l'AUTOMOBILE
sixième partie :
le pilotage assisté
| la
vitesse |
||||
| la
trajectoire |
||||
changement
de file assisté |
||||
| l'arrêt
d'urgence |
||||
| |
|
|
|
une collection d'icônes pour visiter tout le site |
Actuellement quatre types d'éléments interviennent dans la régulation de la vitesse d'une voiture
des tachymètres mesurant la vitesse du véhicule des capteurs de pression qui seront préférentiellement de type capacitif destinés au contrôle du fonctionnement de chaque cylindre du moteur, mais aussi des circuits de refroidissement et de lubrification des capteurs de type accéléromètres intégrés qui peuvent être exploités en liaison avec les airbags d'une part, mais aussi en liaison avec le contrôle de vitesse du véhicule (régulation, ralentissement aux approches des virages..). des capteurs de température monolithiques pour le contrôle des circuits de refroidissement
....
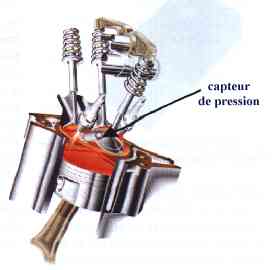
Fig. En a capteurs de pression absolue, en b jauge à essence basée sur un capteur de pression monolithique
sur la figure de droite implantation d'un microcapteur sur un cyclindre
Les technologies utilisées sont basées sur la microélectronique et sont décrites par ailleurs. Notons cependant que divers travaux sont engagés pour essayer de minimiser l'emploi du silicium et le remplacer par des verres spéciaux dont la facilité de micro-usinage semblerait accrue et le coût moindre. On remarquera sur la figure ci-dessus l'élément monolithique au centre et diverses réalisations exploitant ce dernier. On notera en particulier l'importance des connecteurs spécifiques à l'automobile, ainsi que des systèmes de fixation du capteur en particulier sur le capteur en haut et à droite
L'implantation d'un capteur de pression dans un cylindre posait problème en terme de coût, de durée de vie en milieu très agressif et de tenue en température et son exploitation en outre devait tenir compte de conditions d'environnement extérieur variables et dans le cylindre de situations transitoires ou de pseudo équilibre. Les travaux menés conjointement par le groupe Kistler et la compagnie Daimler-Chrysler ont donné naissance à un capteur de type piézorésistif en technologie SiCOI, c'est à dire carbure de silicium (SiC pour les jauges) sur isolant qui se révèle peu onéreuse et de très bonne tenue jusqu'à plus de 500°C. Dans ce dispositif la membrane d'acier support du transducteur atteint 550-600°C tandis que le transducteur reste à 500°C. Une algorithmique très sophistiquée a été développée pour contrôler l'optimisation du fonctionnement du moteur à partir de la mesure de pression dans chaque cylindre. Les bénéfices attendus sont :
Le logiciel développé a aussi pour objectif, grâce à une modélisation poussée du fonctionnement du moteur, la réduction du nombre de capteurs et une plus grande facilité de calibration et de diagnostic (maintenance des performances du moteur). Ce système doit être prochainement implémenté sur un moteur de 3.2l V6 de la gamme Mercédès.
la direction assistée
Jusqu'à très récemment la plupart des véhicules "haut de gamme" bénéficiant d'une assistance avait un système hydraulique d'aide à la direction (HYPAS) dont l'objectif est de faciliter les manoeuvres à faible vitesse des véhicules lourds en rendant la difficulté à tourner le volant fonction de la vitesse.
Ce système hydraulique présente un certain nombre d'inconvénients : il est cher, lourd et augmente sensiblement la consommation de carburant, et s'il se révèle très efficace à faible vitesse il est au contraire un facteur de risque à grande vitesse en raison de son "excès d'assistance", en particulier pour un pilote peu expérimenté, en générant une oscillation autour de la trajectoire idéale, oscillation qu'un conducteur moyen voudra corriger en obtenant le plus souvent en raison des temps de réponse du système un effet sensiblement inverse. En outre il ne fonctionne plus dès lors que le moteur est arrêté ce qui rend les déplacements "manuels" particulièrement pénibles, et interdit d'interrompre le moteur lorsqu'on est dans un bouchon même dans une descente.
Enfin notons que nombre de constructeurs cherchent à développer des motorisations hybrides ou purement électriques pour lesquelles l'assistance hydraulique est impossible.
C'est pourquoi, depuis 1950 environ, tous les équipementiers du secteur ont cherché à concevoir une direction assistée électrique puis récemment électronique. Nous présentons ici le système le plus avancé du à la compagnie Lucas Varity (Solihull,GB) appelé Electric Power Assisted Steering EPAS, mais d'autres solutions plus astucieuses sont possibles (voir partie 4)
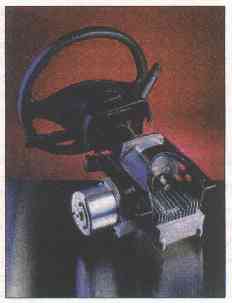
Fig. Système d'assistance
EPAS (doc. Lucas Varity)
Ce système additionne les avantages en rapidité de capteurs optroniques, d'une commande électronique de puissance et d'un microsystème dont les algorithmes ont été optimisés afin justement d'éviter l'oscillation. Bien évidemment l'électronique embarquée possède des éléments redondants afin d'être tolérante aux pannes et des systèmes de diagnostic, si tout l'ensemble est en panne le conducteur retrouve une direction sans assistance mais normale (à la différence du système hydraulique classique qui en cas de panne laisse le conducteur avec une direction quasiment impossible à manoeuvrer s'il n'a des muscles d'haltérophile).
Le schéma de principe ci-dessous montre comment la rotation du volant est identifiée et comment elle est facilitée et contrôlée. Un système optronique à double émetteur-détecteur permet d'identifier le sens de rotation souhaité par le conducteur. La colonne de direction possède une barre de torsion dont la déformation résulte d'une part de la manoeuvre du volant et d'autre part de la rotation induite par le système d'assistance.
Fig. principe de la direction électroniquement assistée
Par différence entre les deux systèmes optroniques placés de part et d'autre de cette barre de torsion on génère le signal d'erreur qui va provoquer la commande du mécanisme d'assistance. L'oscillation est évidemment évitée grâce à un système de type PID numérique adaptatif dont les réactions sont fonction, non seulement de ce signal d'erreur, mais aussi d'autres informations comme la vitesse du véhicule et son état d'équilibre. La figure ci-dessous montre le détail de cette partie de la colonne de direction. On remarquera que la transmission du flux lumineux s'effectue à travers deux disques solidaires de la colonne, ainsi la quantité de lumière reçue par les détecteurs permet d'identifier non seulement la direction de rotation du volant mais aussi son amplitude.

Fig. principe du capteur
optronique. Le volant est à droite de la figure,
tandis que la partie
gauche de l'arbre est raccordée à un module d'engrenage piloté
par le moteur électrique.
Précisons que d'autres systèmes EPAS ont été développés au Japon et intégrés depuis 1996 sur des petits véhicules (Renault-Twingo ou Opel-Corsa en Europe), mais qu'ils n'ont pas donné satisfaction sur les voitures de moyenne et grosse cylindrée. L'un des reproches majeurs est que le volant ne revient pas naturellement en position de repos après avoir été tourné et que le pilote perd le contact avec la route. Des systèmes hybrides électrico-pneumatiques sont parfois employés (système TRW/Delphi pour l'Opel-Astra), mais il est vraisemblable que le nouveau système de Lucas sera prochainement monté sur les voitures du groupe PSA en raison de son faible coût, de l'économie de carburant (>0.3l/100km) par rapport aux systèmes hydrauliques. D'autres solutions existent (cf chap_a4) potentiellement.
l'assistance au changement de file
Faciliter la manoeuvre de la direction est utile, mais non suffisant pour éviter les accidents dus à l'inattention du conducteur. Un problème récurrent est celui du changement de file, à gauche pour doubler ou à droite sur les axes multivoies. De nombreux conducteurs oublient dans ce cas l'usage du clignotant et même parfois celui des rétroviseurs. Les constructeurs ont donc commencé à réfléchir à ce problème et récemment deux innovations ont été imaginées pour remédier partiellement à ce problème. L'une des solutions, déjà commercialisées est due au bureau d'études de Citroën, l'autre à celui de Volvo.
Solution IR
Sur la version d'octobre 2004 de la C5 Citroën on découvre un système basé sur un principe simple : utiliser les bandes blanches limitant les voies de circulation. Un couple d'émetteur récepteur optique est placé de chaque côté du véhicule. Ainsi à chaque franchissement de la bande blanche le signal émis est réfléchi par la bande blanche et reçu par le récepteur. Le top ainsi généré va être instantanément interprété par l'ordinateur de bord qui va examiner si le clignotant du côté correspondant est enclenché ou non. Dans l'affirmative il ne se passe rien, dans la négative une vibration est générée dans le siège du conducteur du côté correspondant. Ainsi si la voiture dérive dangeureusement parce que le pilote est en train de s'assoupir il va se réveiller instantanément mais en douceur et si il veut effectivement changer de file, mais a omis d'enclencher son clignotant, la vibration sera un rappel au code de la route.
Ce système fonctionne bien sur route en bon état mais est pris en défaut sur certaines routes défoncées. Dans ce cas un bouton permet de le mettre hors service.
Miroir intelligent
Volvo a une démarche très différente pour aider au changement de file : il s'agit d'intégrer un système optique dans le miroir du rétroviseur surveillant en permanence l'angle mort. Dès que le pilote enclenche le clignotant ce système réagit et signale par un voyant dans le rétroviseur si une voiture arrive par l'arrière et interdit donc le déboitement.
le freinage ABS (et ses variantes)
Pour optimiser le freinage on doit contrôler simultanément la vitesse globale du véhicule(tachymètre) sa décélération (accéléromètres) mais aussi la vitesse de rotation de chaque roue séparément afin d'éviter le blocage des roues et le dérapage. Ces diverses mesures sont ensuite exploitées dans un dispositif communément appelé ABS (Système Anti-Blocage) plus ou moins sophistiqué selon l'état d'avancement de la réflexion du constructeur. Le réglage séparé, mais pas indépendant, de la pression sur chaque circuit de freinage (sur chaque roue) implique en outre des capteurs de pression., mais aussi de température puisque l'efficacité du freinage dépend à la fois de la force exercée par les plaquettes de frein sur le disque, mais aussi des températures relatives de ces deux éléments, la friction diminuant lorsque la température augmente (et c'est justement cette friction qui entraîne une augmentation de la température du disque et des plaquettes de frein).
A ce premier dispositif sont venus progressivement s'ajouter d'autres systèmes d'aide au freinage exploitant eux aussi des informations fournies par des capteurs sur les roues, mais aussi sur la direction. Ainsi le contrôle électronique de stabilité (ESP) permet d'identifier une situation de dérapage et d'y remédier au mieux en dosant différemment le freinage sur les 4 roues ce qui contrecarre la dérive et donc permet au véhicule de retrouver sa trajectoire initiale. De même en situation de freinage d'urgence le système AFU (aide au freinage d'urgence) améliore l'action de l'ABS en réduisant la distance d'arrêt (ce que ne fait pas l'ABS). Ainsi un véhicule de 1400kg roulant initialement à 100km/h va s'arrêter en 7m de moins environ. Tous ces dispositifs exigent une informatique embarquée de plus en plus conséquente avec des algorithmes sophistiqués mais rapides.
Nous allons présenter quelques éléments de cette aide au freinage
Principe de l'ABS.
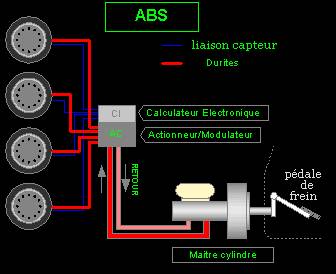
Dans le schéma ci-dessus figurent les principaux éléments de l'ABS : lorsqu'on appuie sur la pédale de frein dans un premier temps aucun courant n'est envoyé dans le modulateur de pression lequel comporte un piston mobile sur chaque voie assurant la répartition homogène de la pression sur chaque roue et ouvrant ou fermant une tuyauterie de retour de pression vers le maitre cylindre. Le circuit de freinage de la roue est normal et la pression exercée par le maître cylindre est directement transmise aux roues. Lorsque une roue se bloque, le calculateur envoie un courant à l'actionneur modulateur de pression à 4 voies. Un électro-aimant attire le piston gérant la pression sur cette roue ce qui ouvre le circuit correspondant et la pression s'évacue alors vers le circuit de retour. En conséquence l'étrier de freinage relâche sa pression : la roue se débloque. Le calculateur contrôle évidemment plusieurs dizaines de fois par seconde le processus et, dès que la vitesse de la roue est redevenue proche de celle des autres roues, le piston de l'actionneur est lui-même relâché ce qui referme le circuit de retour et la pression s'exerce à nouveau sur l'étrier de freinage. Les à-coups que l'on ressent lors d'un freinage d'urgence avec ABS résultent évidemment de ce processus de variation alternative de la pression.
Comment identifier la vitesse d'une roue et donc consécutivement qu'elle est bloquée (ou sur le point de se bloquer). Le procédé est très simple : sur un disque solidaire de l'axe de cette roue, et tournant donc avec lui, on a disposé sur la périphérie un ensemble d'aimants et une bobine est placée au voisinage immédiat. Ainsi, à chaque passage d'un aimant devant la bobine, une impulsion est créée qu'il suffit de compter.
 .
.
principe du capteur ABS
de vitesse
Le système Sensotronic Brake Control (SBC) de Mercedes
Dans le schéma précédent l'essentiel du freinage s'effectue par voie hydraulique, au contraire dans le nouveau dispositif développé par Mercedes une grande partie de la mécanique est remplacée par l'électronique. Des capteurs mesurent la pression dans le maitre-cylindre ainsi que la vitesse à laquelle la pédale de frein est enfoncée, laquelle n'est plus en relation avec le maitre-cylindre. Le freinage est complètement géré par le calculateur qui, évidemment, dispose d'autres informations telles la vitesse de rotation des roues (comme dans l'ABS), l'angle de rotation du volant et sa vitesse de rotation ainsi que l'accélération transversale mesurée par des accéléromètres. Ainsi grâce à un calculateur spécialisé on gère chaque roue séparément en fonction de l'ensemble de ces paramètres ce qui assure le freinage optimal et la correction instantanée d'un éventuel début de dérapage. Un des avantages essentiels du système est la rapidité de réponse qui assure en freinage d'urgence un gain de plusieurs dixièmes de seconde (et à 130km/h on n'oubliera pas que 0.1s représente 3.6m) en raison de la plus grande rapidité de l'électronique par rapport à l'hydraulique traditionnelle. Simultanément, alors que l'ABS ne réduit pas la distance de freinage, le système sensotronic apporte lui un léger gain d'environ 3% à 120km/h.
En outre ce système n'est pas seulement utile en situation d'urgence, il apporte un meilleur confort et agit efficacement en particulier chaque fois qu'il y a risque de glissement, par exemple en cas de freinage dans un virage. La figure ci-dessous montre à l'évidence l'apport du système SBC. A gauche une voiture conventionnelle dérape dans le virage, à droite la voiture équipée d'un contrôle SBC reste en ligne.
fig (courtesy Daimler-Chrysler)
Le système anti-collision City Safety de Volvo
Les systèmes ABS n'évitent pas la collision si le conducteur est inattentif, c'est pourquoi Volvo, qui a constaté que la majeure partie des collisions se produit en ville, a développé un système d'aide au freinage (City Safety) qui ne se substitue pas intégralement au conducteur et donc ne va pas favoriser l'assoupissement de celui-ci. Il s'agit d'un système à faible portée de type radar qui identifie simplement la vitesse relative du véhicule équipé par rapport à celui qui le précède.
Si le véhicule de devant freine soudainement et que le système City Safety détecte qu’il existe un risque de collision, les freins sont préparés afin d’aider le conducteur à éviter l’accident (les plaquettes se rapprochent donc du disque mais sans contact), et c'est le conducteur qui va freiner, mais ce système permet de gagner un ou deux dixièmes de seconde sur la réaction du conducteur qui dans un premier temps reste maître du jeu ce qui évite le sentiment de frustration que ce dernier aurait si le freinage était systématiquement automatique. Toutefois, lorsque le système détecte qu’une collision est imminente, donc si le conducteur ne réagit pas assez tôt, la voiture freine alors automatiquement.
Le système City Safety fonctionne jusqu’à 30 km/h. Si la différence entre la vitesse relative des deux véhicules est inférieure à 15 km/h, le système peut permettre au conducteur d’éviter lui-même entièrement la collision. Entre 15 et 30 km/h, la priorité sera au contraire donnée à la réduction maximale de la vitesse avant l’impact éventuel pour éviter celui-ci.
| |
|
|
 |