
Copyright
© 2000-2015
LHERBAUDIERE
11 pages à l'impression

version
initiale 2002
dernière
mise à jour
17 mai 2013
17 mai 2013
| |
Copyright |
11 pages à l'impression |
|
version
initiale 2002 |
|
| dernière
mise à jour 17 mai 2013 |
CAPTEURS pour l'AUTOMOBILE
cinquième partie :
sécurité et aide au pilotage
| lidar
et autres radars |
||||
| la
carte de profondeur |
||||
| une
autre utopie |
||||
| la
fusion de données |
||||
une
caméra IR astucieuse |
||||
multicommande |
||||
| |
|
|
|
une collection d'icônes pour visiter tout le site |
L'augmentation continue du trafic automobile conduit à une augmentation des risques d'accident qu'aucune réglementation, si contraignante soit-elle, ne pourra subjuguer. Jusqu'à récemment les concepteurs de véhicules automobiles avaient mis l'accent sur la possibilité, en cas de crash, d'absorber dans la déformation de la carrosserie un maximum d'énergie, mais le meilleur moyen de réduire les effets d'un accident c'est encore de tout mettre en oeuvre pour l'éviter. C'est pourquoi divers dispositifs d'aide au pilotage sont envisagés. Les ingénieurs cherchent maintenant à exploiter au mieux les microprocesseurs, circuits intégrés spécialisés radars et algorithmes rapides, ce qui constitue une véritable révolution. Nous n'en ferons pas le tour, le thème de la "route intelligente", idée utopique s'il en fût, a été ces dernières années très soutenu en particulier au niveau européen (programmes Prométhéus et autres), mais aussi au Japon (Advanced Cruise Assist Highway System Research Association) et aux USA (Departmennt of Transportation's Intelligent Transportation Systems Joint Program Office). La conduite entièrement automatisée n'est pas envisagée avant au moins 20 ans, par contre les constructeurs peuvent augmenter la sécurité avec des technologies déjà connues. Nous retiendrons 6 approches :
Deux concepts peuvent être envisagés, actifs ou passifs. Les systèmes actifs sont basés sur l'emploi d'un radar ou système équivalent, les systèmes passifs exploitent une image issue d'une simple caméra.

La photo ci-dessus montre une approche utilisant un télémètre laser à balayage destiné à la plage 0-150 m et l'objectif est d'obtenir une précision de télémétrie de 1m environ, en étant capable de suivre un objectif dans un virage et en évitant les fausses alarmes, mais aussi de fonctionner dans des conditions difficiles puisque c'est dans ces conditions que le pilote a le plus besoin d'aide (fortes pluies, brouillard, poussière...) et il est clair qu'alors les techniques exploitant le proche IR sont défaillantes.
Dès mai 1998, Toyota équipait son véhicule haut de gamme (dénommé Progress) d'un système de contrôle adaptatif utilisant un laser, tandis que Nissan peu après exploitait un radar.
Dans le projet Prometheus 2 options ont été testées lidar IR et radar hyperfréquence.
c'est une option qui s'appuie sur la disponibilité d'émetteurs IR à base de GaAs ou d'InP et de circuits Si pour la réception et les interfaces de communication. Le système est relativement peu onéreux et facile à intégrer, mais peu efficace sous la pluie ou la neige car le faisceau lumineux étant très étroit est diffusé par les goutelettes d'eau ce qui diminue considérablement le rapport signal/bruit. De la même façon l'accumulation de boue ou même de poussière sur la voiture peut bloquer le faisceau. En pratique le seul dispositif commercialisé (Lexus LS430) est automatiquement interrompu dès que les conditions météo sont défavorables (en détectant le fonctionnement des essuie-glaces!) ce qui en diminue très sensiblement l'intérêt.
Les systèmes micro-ondes
Les radars sont bien connus, mais l'application automobile implique de trouver le meilleur compromis possible entre le coût de l'équipement et sa fiabilité, c'est à dire la nécessité d'avoir un taux de fausses alarmes réduit. Cependant tous ces systèmes actifs basés sur l'émission d'un signal et l'analyse du signal renvoyé par l'obstacle présentent une difficulté bien connue : ils fonctionnent à merveille sur les pistes d'essai des constructeurs où circulent quelques véhicules dont un seul est équipé du système radar, qu'en sera-t-il lorsque la quasi totalité des véhicules émettront des ondes radars dans une même plage de fréquence? comment les détecteurs discrimineront-ils le bon signal des autres?
Actuellement le détecteur possède une plage de détection relativement large autour de la fréquence de l'émetteur (qui est dans la plage millimétrique 76-77 GHz, afin d'utiliser une antenne de faible dimension compatible avec l'exigence d'intégration au niveau de la calandre du véhicule ) pour la simple raison que la fréquence d'émission est susceptible de varier légèrement en raison de dérives (thermiques par exemple) des circuits d'émission, et de réception. Et bien entendu le circuit de réception reçoit toutes les ondes qui l'atteignent. En outre on imagine aisément qu'une onde émise par le véhicule venant en face parcourant donc une seule fois la distance entre les deux véhicules est forcément moins affaiblie que celle dont seul l'écho sur l'obstacle revient au véhicule émetteur après un aller-retour. L'électronique associée risque donc de devoir être très complexe et donc très chère. Notons qu'actuellement, à 76GHz, les dimensions d'un radar sont sensiblement de la taille de deux livres de poche. A 125GHz, il serait possible de réduire les dimensions, ce qui permettrait d'intégrer les radars dans les rétroviseurs extérieurs, mais le coût des composants, actuellement réservés aux militaires US, est prohibitif.
Le radar présente évidemment l'énorme avantage de "voir" jusqu'à 150m dans le brouillard ou la pluie, mais ses détracteurs pensent qu'il encourage l'automobiliste à rouler trop vite et, qu'en cas de défaillance de détection d'obstacle par l'automatisme, le crash sera alors inévitable.
En 2005 on peut dire que tous les constructeurs travaillent sur cette exploitation du radar et quelques essais ont été effectués sur diverses portions d'autoroutes en Europe. Les résultats sont pour l'instant peu encourageants pour diverses raisons :
- la première tient à la modification du comportement du conducteur lorsqu'il est au volant d'un véhicule équipé d'un radar. Tous les conducteurs, consciemment ou inconsciemment, adoptent deux attitudes, l'une passive consiste à faire totalement confiance au radar, l'autre active a pour objectif de tromper le radar.
- Dans certains prototypes le radar agit directement sur la vitesse du véhicule en maintenant une distance constante avec le véhicule qui précède. Cela fonctionne bien en ligne droite, mais dès qu'une courbe est un peu sévère le radar est pris en défaut avec deux inconvénients majeurs: en premier lieu il peut perdre la trace du véhicule le précédent, mais surtout il peut détecter un obstacle au bord de la route (un arbre par exemple, mais aussi un pont qui surplombe la route) et déclencher inopinément une procédure d'arrêt d'urgence qui bien évidemment conduit à une catastrophe, surtout si derrière il y a un véhicule sans radar, dont le pilote va forcément être surpris par ce ralentissement brutal et totalement injustifié. Il est tout aussi vraisemblable que le pilote de la voiture contrôlée par radar et qui avait fait confiance à celui-ci, et donc diminué sa propre vigilance, va aussi être surpris et risque de donner un coup de volant malheureux.
- Le second inconvénient c'est lorsque la tenue de route du véhicule suiveur est sensiblement moins bonne que celle du véhicule qui précède (et malgré les progrès effectués par certains constructeurs à la traine, les écarts de tenue de route sont encore gigantesques entre les meilleurs et les plus mauvais). Actuellement l'informatique embarquée n'est pas capable de gérer ce problème.
- Enfin le dépassement d'un véhicule pose problème puisqu'il y a évidemment conflit entre le radar et son électronique associée et le conducteur. Pour sortir de ce conflit le conducteur va donc devoir adopter une attitude active, c'est à dire prévoir son dépassement de beaucoup plus loin afin de tromper le radar, ce qui sur autoroute n'est pas trop grave (quoique induisant des vitesses de dépassement supérieures et donc une quasi certitude de dépassement des vitesses autorisées) mais est beaucoup plus problématique sur route, en particulier sur route sinueuse où la visibilité est moindre et où le dépassement s'effectue actuellement sur une très courte distance, avec l'obligation pour le véhicule le plus rapide de s'approcher fortement du véhicule précédent avant de déboiter.
![]() On voit donc qu'actuellement l'objectif de sécurité accrue n'est
absolument pas atteint. Enfin une des difficultés majeures des
systèmes embarqués d'aide au pilotage est bien évidemment,
en admettant qu'ils soient fiables, que la totalité des véhicules
ne sera équipée qu'au bout d'une bonne dizaine
d'années pendant lesquelles cohabiteront des véhicules
traditionnels et d'autres équipés avec donc la multiplication
des risques précités. En particulier la distance maintenue automatiquement
entre deux véhicules est relativement importante en général
et permet à un troisième véhicule non radarisé de
s'immiscer au milieu. Dans ce dernier cas, une fois de plus, la distance entre
le véhicule piloté par radar et celui le précédent
étant brutalement réduite, bien en dessous de la valeur préréglée,
il va s'en suivre un ralentissement brutal du véhicule piloté
avec les mêmes conséquences aberrantes pour les véhicules
qui suivent, qu'ils soient ou non pilotés par radar.
On voit donc qu'actuellement l'objectif de sécurité accrue n'est
absolument pas atteint. Enfin une des difficultés majeures des
systèmes embarqués d'aide au pilotage est bien évidemment,
en admettant qu'ils soient fiables, que la totalité des véhicules
ne sera équipée qu'au bout d'une bonne dizaine
d'années pendant lesquelles cohabiteront des véhicules
traditionnels et d'autres équipés avec donc la multiplication
des risques précités. En particulier la distance maintenue automatiquement
entre deux véhicules est relativement importante en général
et permet à un troisième véhicule non radarisé de
s'immiscer au milieu. Dans ce dernier cas, une fois de plus, la distance entre
le véhicule piloté par radar et celui le précédent
étant brutalement réduite, bien en dessous de la valeur préréglée,
il va s'en suivre un ralentissement brutal du véhicule piloté
avec les mêmes conséquences aberrantes pour les véhicules
qui suivent, qu'ils soient ou non pilotés par radar.
En fait, il faudrait sans doute bien plus d'une dizaine d'années pour que tous les véhicules soient équipés, il suffit pour s'en convaincre de circuler de nuit sur les routes françaises et de compter le nombre de véhicules qui ont encore des feux jaunes, pourtant disparus des voitures neuves depuis bien plus de dix ans.
système passif bi-caméra
Le principe repose sur la comparaison de deux images prises simultanément par deux caméras embarquées sur le véhicule. Un traitement d'image permet en effet de mettre en correspondance les éléments caractéristiques des deux images, puis d'en déduire une carte de profondeur c'est à dire la localisation en distance d'un éventuel obstacle, enfin en comparant les images successives et tout particulièrement les cartes de profondeur il est possible de calculer la vitesse relative de l'obstacle et donc d'anticiper un freinage d'urgence. Nous présentons ici les travaux menés au laboratoire PSI (cliquer pour en savoir plus)
Les travaux de recherche, menés par P. Miché et A. Bensrhair au PSI-Rouen, ont pour axe directeur l'étude de systèmes opto-électroniques reproduisant les fonctions de la vision humaine et, en particulier la perception du relief et celle du mouvement. La finalité est l'obtention de systèmes capables d'assister l'homme dans des tâches telles que la conduite d'un véhicule automobile ou l'interprétation de scènes 3-D, ou de le remplacer dans le cas de tâches réalisées par des robots.
L'originalité des recherches tient au respect de trois principes :
le système de vision doit fonctionner de manière passive, c'est à dire sans nécessiter d'éclairage spécifique tel qu'un pointage par faisceau laser ou un éclairage structuré pour éviter les risques d'interférences avec d'autres systèmes. Il doit fonctionner en temps réel, c'est à dire fournir une réponse en un temps comparable (et si possible inférieur) à celui obtenu en utilisant la vision humaine, c'est-à - dire quelques dixièmes de seconde. Il doit être automatique, c'est à dire ne nécessitant aucune intervention humaine pour ajuster les paramètres décisionnels, c'est-à dire pour suivre les variations de luminosité (ensoleillement, passage sous un pont, ombres dues à d'autres véhicules)

Photo PSI-Insa Rouen
mesure de distances en temps réel par stéréovision passive
A partir de deux vues d'une même scène, prises par deux caméras synchronisées à axes optiques parallèles, un système de traitement spécialisé calcule la distance de chaque point de la scène au plan de prise de vue et affiche les résultats sous forme d'une carte de profondeur sur un moniteur vidéo. Pour répondre aux critères de vitesse et d'autoadaptativité requis par un tel système, une géométrie particulière de caméras a été adoptée et de nouveaux algorithmes ont été développés autour d'un concept original : la déclivité. L'objectif des travaux en cours est la réalisation d'un système embarquable, impliquant une miniaturisation de l'ensemble et l'obtention d'un temps de traitement total inférieur à 0.1s compatible avec les exigences de l'automobile.
...
image gauche.............................................image droiteCi-dessus nous montrons un exemple d'images vues par les deux caméras et ci-dessous la carte de profondeur calculée en temps quasi réel à gauche et à droite la carte des vitesses visualisées en fausses couleurs identifiant parfaitement le mobile.
....
carte de profondeur...............................carte de vitessesmesure de vitesses axiales en temps réel par stéréovision passive
Ce thème, initié plus récemment, est une extension du précédent dont il reprend les outils de base. L' apport dans ce domaine est, à la différence de la majorité des travaux concurrents, que le système n'a besoin d'aucune connaissance a priori et ne nécessite pas la reconnaissance des objets en mouvement. Dans une première étape, il a été possible d'établir en laboratoire des cartes de vitesses réalistes en environ 0.1s sur PC équipé de cartes DSP de Texas Instruments. Des travaux d'expérimentation sur véhicule réel ont ensuite été entrepris et pour cela l'électronique associée a été miniaturisée et intégrée dans le capteur de vision.
L'estimation du mouvement 3D est souvent résolue en employant des techniques de mise en correspondance spatio-temporelle et pour obtenir de bons résultats, il est préférable d'utiliser des primitives de haut niveau tels que des volumes ou des surfaces. Cependant le calcul des vitesses exige la résolution de systèmes complexes d'équations non linéaires ce qui est peu compatible avec l'exigence de temps réel de la conduite automobile.
Pour simplifier les calculs on devra exploiter des calculs bas niveau (points 3D). Les points 3D sont le résultat de la mise en correspondance définie plus avant et le peu d'information lié à cette primitive va être compensé par un important débit d'images 3D (10 images par seconde). De plus, dans un environnement routier le résultat de l'interpolation peut être modélisé par des surfaces planes normales à l'axe optique du système de stéréovision. Ainsi, entre deux instants d'analyse successifs une même surface plane se recouvre et il est alors possible de calculer la vitesse axiale des pixels qui se trouvent dans les zones de recouvrement sans mise en correspondance spatio-temporelle. Le choix du calcul de vitesse axiale est d'autant plus motivée que la configuration du capteur offre l'avantage de simplifier les équations permettant le calcul de la vitesse axiale. Et, les mouvements 3D des scènes autoroutières sont essentiellement des translations suivant l'axe de la route correspondant à l'axe optique du capteur.
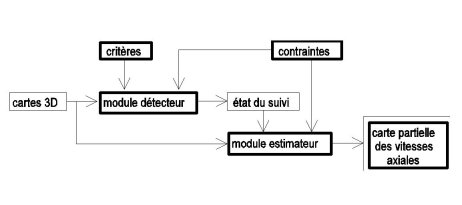
figure PSI-Insa Rouen
L'estimation de la vitesse axiale se décompose alors en deux étapes.
Dans la première étape, un traitement au niveau du point image
est fondé sur l'utilisation d'une structure détecteur-estimateur.
Cette structure fournit la carte partielle des vitesses axiales en estimant
la composante axiale de la vitesse des points de l'image qui appartiennent aux
aires de recouvrement. Dans une deuxième
phase, les informations sur le voisinage du point image interviennent en utilisant
une opération morphologique.
L'intérêt majeur de cette technique passive c'est évidemment qu'elle ne surcharge pas le paysage électromagnétique puisque le système se borne à voir la même chose que le conducteur.
Les difficultés de cette technique tiennent à l'ampleur des calculs demandant tout à la fois l'emploi de processeurs de signaux ultra-rapides et une optimisation algorithmique. En outre en environnement à visibilité réduite la caméra CCD n'est pas plus performante que l'oeil humain, elle ne voit pas à travers le brouillard.
système de guidage passif mono-caméra
Plutôt que de tenter d'identifier puis de suivre le véhicule précédent, certains constructeurs ont choisi de tester une autre utopie qui est de suivre la ligne blanche présente sur le bord de la route. L'idée est simple et avec une simple caméra monochrome et relativement peu de traitement d'images et d'électronique embarquée on peut maintenir le véhicule à une distance préréglée de la bande blanche.
Là encore ce système favorise l'endormissement du conducteur et pourtant il est en défaut dès que la ligne blanche vient à manquer ce qui est très fréquent : c'est à dire aux intersections, sur les portions en réfection, et bien entendu lorsqu'on veut dépasser ou effectuer un changement de direction. En outre, sur le réseau français, très peu de routes disposent d'une ligne blanche sur le bord droit. Et ici encore dès qu'il y a une forte sinuosité le pilote humain actuellement reste encore plus performant que le calculateur. Enfin ce système ne permet pas d'éviter certaines difficultés fréquentes sur nos routes : trou dans le bord de la chaussée, petit animal trottinant sur le bord de la route, voire sac en plastique ou objets divers qui peuvent se trouver sur la trajectoire et provoquer divers incidents plus ou moins graves. Ainsi récemment lors d'un test en Europe un véhicule d'essai, d'une grande marque que nous ne préciserons pas, a percuté un sanglier arrêté sur le bord de la route ce qu'un automobiliste en état de vigilance normal eut facilement évité.
systèmes multicapteurs
Tandis que certains constructeurs, tel Mercedes, multiplient les radars pour obtenir plusieurs informations dont ils déduisent par calcul la distance et la vitesse du véhicule précédent, d'autres s'orientent vers un processus de fusion de données mettant en jeu simultanément une caméra stéréo et un radar, celui-ci étant destiné à la vision lointaine tandis que les caméras permettent la détection à faible distance des bords verticaux des voitures. Fujitsu étudie ainsi un processeur de fusion spécialisé.
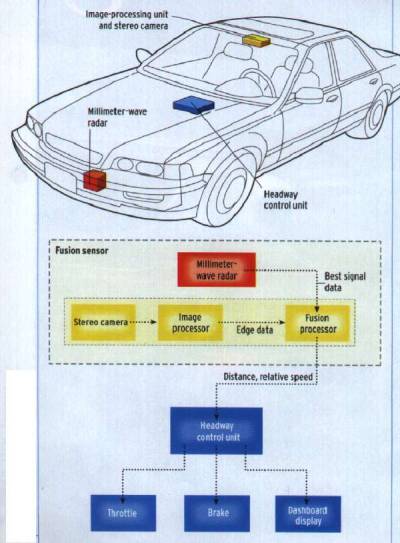
Les figures suivantes permettent de comprendre comment l'ensemble est agencé.
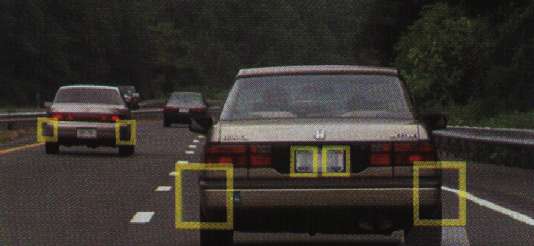
Les caméras sont chargées spécifiquement de la vision des zones encadrées en jaune pour lesquelles le traitement d'image sera effectué afin d'identifier uniquement les bords verticaux des voitures. Le système de contrôle n'intervient que dans une zone limitée devant le véhicule ainsi que le montre la figure ci-dessous.
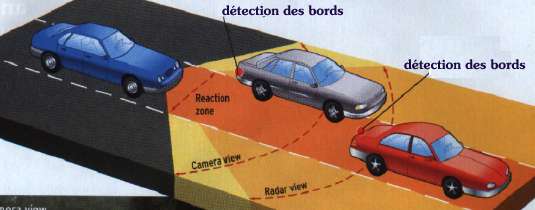
Cette figure nous rappelle simultanément que l'angle de vision d'une caméra est bien supérieur à celui du radar (16° seulement). Pour balayer un champ important l'antenne d'un radar doit donc être mobile ce qui pose évidemment le problème de l'usure mécanique et du jeu lesquels limitent la précision et la fiabilité. Le système présenté possède en outre l'avantage de fonctionner aussi à faible vitesse, c'est à dire lorsque la circulation est très dense et fortement ralentie. Ainsi il peut contrôler la vitesse de 0 à plus de 130km/h alors que tous les systèmes actuels de "cruise control" sont inopérants au dessous de 40km/h.
Fujitsu précise employer une caméra stéréo fournissant une image 640x480 pixels. En pratique les deux caméras sont distantes de 20cm et montées derrière le pare-brise (devant le rétroviseur intérieur) leur angle de vision est de 40°. L'algorithme utilisé, en se limitant à la détection des verticales, est très rapide et sait distinguer une verticale fixe (arbre, panneau) d'une verticale mobile. En outre la combinaison radar-caméra permet de suivre le véhicule qui précède même dans les courbes. La prochaine étape de ce projet consistera à intégrer non plus 1 radar unique mais un réseau de radars exploitant le déphasage de signaux émis par plusieurs antennes fixes pour balayer plus vite le champ d'analyse. Ainsi sans dispositif en mouvement il sera possible d'aller beaucoup plus vite dans la détection. Un tel système, testé semble-t-il avec succès aux USA, n'est toujours pas sur le marché en fin 2005.

En 2005, une nouvelle approche, basée sur les progrès de la miniaturisation des composants optiques par le biais du développement des nanotechnologies, voit le jour avec des perspectives très prometteuses et une apparition sur les véhicules courants prévue dès 2006. Le système repose sur un nouveau capteur d'image 3D l'imageur PMD (Photonic Mixer Devices)
imageur
PMD
Avec ce capteur CMOS on a un gain en terme de sensibilité d'un facteur supérieur à 100 par rapport aux capteurs CCD ce qui va permettre la réalisation de systèmes de vision particulièrement robustes en terme de détection d'obstacle et de classification.
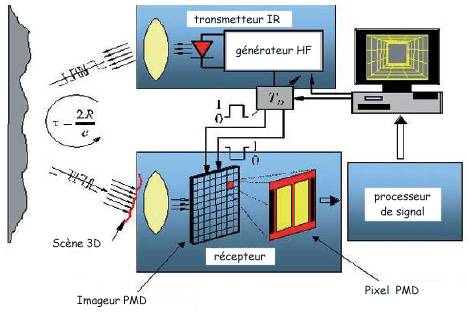
Une caméra PMD est basée sur le temps de vol, c'est à dire sur le déphasage d'une lumière modulée en radio-fréquence, à partir d'une LED de 850nm de longueur d'onde. Alors que les radars 3D basés sur des lasers nécessitent des scanners, la caméra PMD exploite l'intensité d'une lumière incohérente modulée pour l'illumination simultanée de l'ensemble de la scène 3D. La fréquence de modulation se situe dans la plage 10-20 MHz. La phase de la lumière modulée réfléchie contient toute l'information utile. On va corréler ce front d'onde incident avec un champ électrique modulé et accordé au sein de chaque pixel. Le résultat c'est un diagramme d'interférence RF quasi stationnaire. Chaque pixel comporte en outre un élément de traitement de signal qui va générer un signal basse fréquence contenant l'information de distance de chaque élément. En raison de l'intégration d'un système de suppression de la lumière de fond au niveau de chaque pixel, la caméra est insensible à la lumière solaire ou à toute source de lumière artificielle autre que la lumière modulée. L'image 3D n'est donc pas affectée par des variations des conditions d'éclairement.
Dans l'expérimentation chez Daimler-Chrysler on a utilisé un imageur 16x24 pixels placé, ainsi que la LED infra-rouge, dans le phare anti-brouillard. Comme la LED émet en IR ça n'est absolument pas perceptible par les autres usagers, le faisceau est suffisamment large pour couvrir toute la surface et l'unité de calcul est parfaitement capable de calculer la forme et la direction de l'objet qui s'approche et d'agir sur les commandes adéquates de ralentissement, ou si la collision est inévitable les airbags. Le dispositif s'est révélé capable de suivre un autre véhicule à 10m et de faire la différence entre un obstacle fixe, un véhicule en marche et un piéton.

vue éclatée
du système testé
Dans cette expérimentation une caméra a été ajoutée au niveau du pare-soleil de manière à examiner après-coup le bon fonctionnement du système qui a été conçu dans le cadre d'un programe européen associant Daimler, Conti Temic, le centre de Microélectronique de Dresde, ainsi que la Fachhochschule de Trier et l'Université de Siegen. Ce programme de recherche devait s'achever en juillet 2006.
référence:
Friedrich Zywitza, Photonic Mixing Device PMD - eine 3D-Kamera für
Fahrerassistenzsysteme, TÜV Konferenz , 2004, Februar, Köln
Tandis que certains constructeurs privilégient les recherches visant à éviter les accidents, certains équipementiers ont développé une approche à plus court terme visant à contrôler le déclenchement optimum de l'airbag en cas de collision. On se souvient que, dans les premières années d'utilisation de ce coussin gonflable, divers déclenchements intempestifs du système de mise à feu de l'airbag ont conduit à des accidents graves. La compagnie Bosch a donc développé un circuit électronique spécialisé pour arriver à un maximum de protection. En cas de collision, c’est la précision qui est décisive. L’airbag doit être déclenché au bon moment, à la bonne milliseconde. S’il est déployé trop tard, les occupants risquent de se blesser. Si le déclenchement est effectué trop tôt, le conducteur et le passager avant ne seront pas protégés de façon optimale, puisque l’airbag n’aura déjà plus sa forme idéale au moment d’amortir le choc des occupants. Et si la collision est minime il est inutile de déclencher l'airbag.
Rappelons que l'airbag est un sac qui se remplit très rapidement d'azote lors d'un choc pour éviter que la tête de la personne à protéger ne heurte violemment une partie dure de la voiture : volant, montant latéral du pavillon, sièges (passagers arrières), etc. Il permet en pratique de répartir la force du choc sur une surface corporelle plus grande, d'une part,et, d'autre part, de limiter cette force par le biais d'un amortissement. En effet, l'airbag n'est pas un sac étanche et des trous laissent passer l'air. Il est donc primordial que le déclenchement s'effectue à la milliseconde près. Dans un système intelligent, outre les détecteurs de collision (essentiellement des accéléromètres -cf chapitre techno- donnant au moins trois informations dans les directions x y z), un capteur permet de savoir si les sièges passagers sont occupés ou non, afin de ne pas déclencher un airbag inutilement en cas d'accident. En outre, des capteurs de position et des jauges de contraintes, installées dans les sièges, indiquent également le poids et la taille de l'occupant, de même que la position de recul du siège. Volume, force et temps de réaction seront ensuite adaptés, de sorte que les personnes de petite stature n'encourrent plus que peu de risques de lésions provoquées par l'impact de l'airbag.
Notons de plus en plus la présence d'airbags latéraux, d'abord intégrés dans les portières et parfois, comme chez Honda, intégrés directement dans le siège. Ce système, appelé SMART SRS chez Honda, contrôle le fonctionnement des airbags latéraux grâce à des capteurs placés dans le siège. Ces derniers détectent la position de l'occupant et décident si elle est compatible avec l'ouverture de l'airbag latéral. En effet, ces capteurs vérifient que la position du passager permet à l'airbag latéral de se gonfler sans engendrer de dommages physiques pour l'occupant.
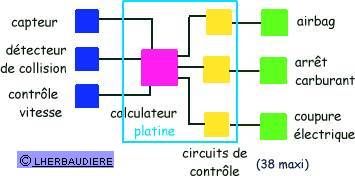
Depuis mai 2003, Bosch a lancé son nouveau circuit de commandes électroniques pour airbags – l’AB9. Une platine de seulement quelques centimètres carrés traite l'ensemble des signaux issus de différents capteurs du véhicule et décide ensuite des éléments de protection à activer en fonction de la situation. Il est ainsi possible de déclencher les systèmes de protection ad hoc et ce, juste au bon moment. Le calculateur est en outre capable de décider de l'intensité du gonflage (2 positions) en fonction des informations émises par les capteurs. La commande électronique pour airbags active également d’autres mesures préventives, tels que le déverrouillage des portes ou la coupure de l’alimentation en carburant. Grâce au double soudage Reflow – qui permet d’ajouter bien plus de composants, et donc plus de fonctions, plus de 38 circuits pour airbags, tendeurs de ceinture, interrupteur de circuit électrique ou appel d’urgence automatique sont ainsi intégrés sur cette platine.
| |
|
|
|

