
Copyright
© 2000-2015
LHERBAUDIERE
5 pages à l'impression

version
initiale 2002
dernière
mise à jour
22 mars 2013
22 mars 2013
| |
Copyright |
5 pages à l'impression |
|
version
initiale 2002 |
|
| dernière
mise à jour 22 mars 2013 |
quatrième partie (4/7)
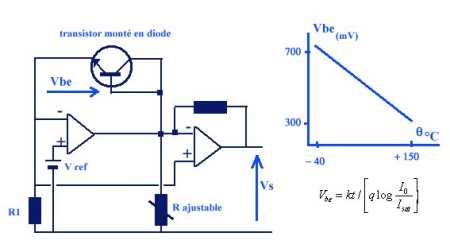
| thermomètre
électronique |
||||
| le
bolomètre |
||||
| les
applications |
||||
| une collection d'icônes pour visiter tout le site | ||||

| type résistance Nickel platine Pt/Al2O3 thermistance thermocouple Cu/const Fe/const Pt/Pt-Rh Infra Rouge |
domaine en °C -50 +250 -250+600 -250+1200 -50 +200 -250+200 -250+600 -50 +1300 0 +1400 |
précision % em 0.5 à 1 id 1 0.75 à 1 id id 1 à 2 |
réponse à 63% em 10s à 2 mn id id 2s à 2 mn id id 0..3 à 1s |
|