
Copyright
© 2000-2015
LHERBAUDIERE
4 pages à l'impression

version
initiale 2002
dernière
mise à jour
22 mars 2013
22 mars 2013
| |
Copyright |
4 pages à l'impression |
|
version
initiale 2002 |
|
| dernière
mise à jour 22 mars 2013 |
neuvième partie : bus et système décentralisé
| un
exemple |
||||
| un
protocole général |
||||
| moins
cher |
||||
| |
|
|
|
une collection d'icônes pour visiter tout le site |
contrôle de portière
La réduction des nombres de câble s'effectue aussi par le biais de l'exploitation d'un bus
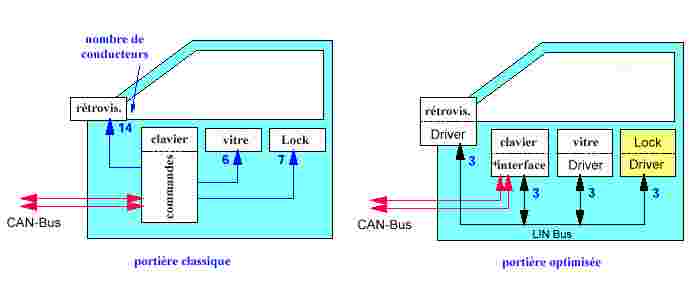
Fig. à
gauche la circuiterie d'une portière classique, à droite la même
optimisée
Sur la figure ci-dessus nous présentons l'électronique intégrée dans une portière avant de voiture. Classiquement on dispose sur la portière d'un boitier avec des interrupteurs de type poussoirs qui permettent la commande de positionnement du rétroviseur, l'ouverture ou la fermeture de la vitre et en outre un dispositif contrôle la fermeture de la portière. Les interfaces de commandes sont combinées au boitier de poussoirs. Il en résulte un nombre important de câbles circulant dans ladite portière. Les progrès de la mécatronique permettent d'imaginer une autre solution figurée sur le schéma de droite. Dans cette architecture chaque interface de commande (driver) est intégrée là où elle doit agir, ainsi le bus sous protocole CAN sera simplement connecté à un aiguillage qui, via un bus à 3 conducteurs, dispatchera ou recueillera les informations de contrôle/commande. Le gain de câblage est évident.
Ainsi dans un véhicule moderne la fermeture des vitres est commandée via un moteur et l'arrêt automatique dudit moteur lorsque la vitre est totalement remontée est commandé à partir de l'information générée par un capteur à effet Hall. A titre d'exemple nous donnons ci-dessous l'architecture du système proposé par le groupe Thomson afin de minimiser le cablage.
Toute l'électronique est intégrée dans un microcircuit, à l'exception des composants de puissance et l'ensemble est regroupé dans un module unique intégré dans la portière du véhicule. La commande à partir d'un clavier est transmise via le bus LIN qui véhicule l'ensemble des informations concernant les divers systèmes inclus dans la portière (porte non fermée, voyant de signalisation, rétroviseur, relevage de vitre...) qu'il s'agisse de commandes ou d'informations à l'usage du système d'affichage sur le tableau de bord.
Cet exemple illustre bien la tendance actuelle qui consiste à associer d'une manière décentralisée un microcontrôleur spécialisé à chaque fonction spécifique, plutôt que d'intégrer un gros calculateur centralisant toutes les commandes.
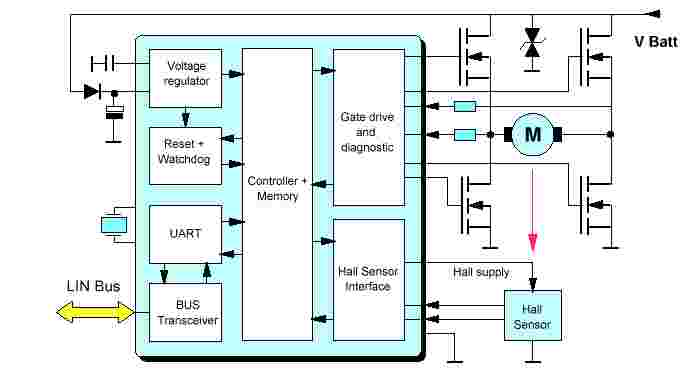
Fig. commande
de descente/relevage de vitre de portière (doc. ST Microelectronics)
problèmes de bus
Les systèmes présentés ci-dessus privilégient des solutions limitant le nombre de cables mais nécessitent cependant une télécommande indépendamment d'une ligne d'alimentation et la multiplicité croissante des commandes déportées a incité nombre de groupements associant constructeurs automobile, fabricants de composants et spécialistes de connectique à promouvoir des solutions de communication normalisées et adaptées au contexte particulier de l'automobile. Un système de bus a donc été proposé pour simplifier l'intercommunication entre tous les éléments constituant le réseau d'une automobile.
La première approche était le protocole CAN (pour controller area network), développé par Bosch dans le courant des années 80, dans lequel tous les capteurs, actuateurs et organes de commande disposent des mêmes droits et sont connectés sur un bus série.
Le protocole CAN de base leur permet d'échanger 2048 variables. Ce protocole, ainsi que les paramètres électriques de la ligne de transmission, sont fixés par la norme 11898. La transmission physique s'effectue via une paire torsadée, une liaison infrarouge, hertzienne ou par fibre optique.
Le protocole implique l'envoi d'un message identificateur de 11 bits (2048 possibilités) permettant au seul récepteur concerné de prendre en compte la suite du message qui peut comporter jusqu'à 8 octets de données. Le code d'identification prend en compte les priorités afin d'éviter les conflits sur le bus, certains actionneurs ou capteurs étant évidemment prioritaires pour des raisons le plus souvent de sécurité (freins!). A titre d'exemple nous donnons ci-dessous la trame typique d'un message CAN standard. Il existe un format étendu qui se distingue par une zone d'identification complémentaire de 18 bits.

fig. trame
d'un message CAN standard
Une trame est composée des champs suivants :
En terme de performance le tableau ci-dessous donne les débits préconisés en fonction de la longueur de cablage.
| |
|
| |
|
| |
|
| |
|
| |
|
En pratique compte tenu de la complexité des voitures actuelles qui peuvent avoir plusieurs km de câble c'est la dernière ligne qui est la plus proche de la réalité et l'on voit que la rapidité de transfert des messages risque d'être insuffisante. Cela peut en cas d'urgence (risque d'un accident) se révéler problématique et explique peut-être certains incidents mentionnés par la presse en 2005.
le bus LIN
Le bus CAN présentait en outre un inconvénient majeur qui était de travailler en 5V alors que la batterie d'une voiture est de 12V et d'imposer une interface non normalisée impliquant un contrôleur entre l'utilisateur et le dispositif d'émission réception quel qu'il fût ainsi que le montre l'exemple précédent.
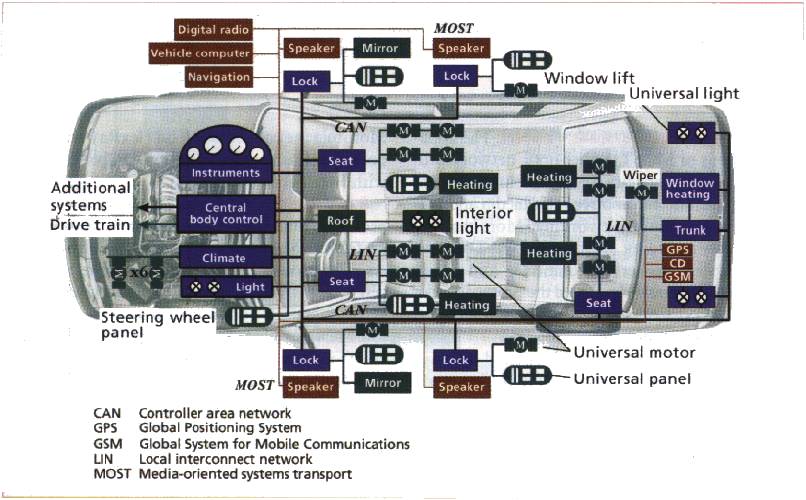
fig. réseau
LIN typique d'une automobile moderne (courtesy Electronic Design)
C'est pour toutes ces raisons que les constructeurs allemands, associés à Volvo, Motorola et d'autres ont plus récemment proposé une solution appelée LIN (local interconnect network) qui présente de nombreux avantages en terme de coût.
En effet il fonctionne en 12V avec un seul fil et exploite l'interface standard UART/SCI commune à de très nombreux microcontrôleurs. Il est en outre compatible avec la norme ISO9141 (protocole de transmission basé sur le codage NRZ) et le coût par noeud du réseau est de 1$ contre plus de 2$ pour le système CAN. En revanche sa vitesse est apparemment moindre (1 à 20kbits/s) mais sa structure évite la nécessité de router tous les messages sur l'ensemble du réseau, mais seulement sur le sous réseau concerné ce qui compense largement. Notons enfin que le concept LIN pourrait s'appliquer à d'autres domaines que l'automobile et qu'on peut combiner les deux réseaux LIN et CAN ainsi que le montre la figure ci-dessus.
| |
|
 |