
Copyright
© 2000-2015
LHERBAUDIERE
6 pages à l'impression

version
initiale 2002
dernière
mise à jour
11 février 2014
11 février 2014
| |
Copyright |
6 pages à l'impression |
|
version
initiale 2002 |
|
| dernière
mise à jour 11 février 2014 |
dixième partie :prospective
| l'emploi
du 42V |
||||
| un
joystick élaboré |
||||
| Une
DAE plus précise |
||||
la
voiture sans pilote |
||||
| |
|
|
une collection d'icônes pour visiter tout le site | |
Prospective à moyen terme
Dans les chapitres précédents nous avons indiqué des développements soit déjà mis en oeuvre, soit en voie d'achèvement et qui seront prochainement généralisés. Dans ce dernier chapitre nous allons mettre l'accent sur des recherches à plus long terme dont on peut espérer qu'elles aboutiront à une commercialisation dans un délai de cinq à dix ans.
Il ne s'agit ici plus de simples améliorations de détail mais bel et bien d'une véritable révolution qui affectera notre mode de conduite de manière importante.
les problèmes énergétiques
Avant d'avancer dans la prospective il convient de préciser qu'un des objectifs poursuivi par l'ensemble des constructeurs concerne évidemment la réduction de la pollution. On a vu dans la première partie comment mieux la contrôler à l'aide de procédés faisant appel à des capteurs chimiques pour mieux optimiser la combustion. Une seconde voie consiste à exploiter l'électricité d'une manière plus efficace en utilisant un moteur électrique chaque fois que c'est préférable à la place du moteur thermique. Cela implique une alimentation électrique sous une tension sensiblement accrue et après considération des principaux problèmes, avantages et inconvénients liés à une telle augmentation les constructeurs ont choisi une tension de 42V soit environ 3 fois celle de la batterie de 12V classique (qui en fait 14 en pleine charge).
Cela va entraîner diverses conséquences. En particulier tous les éléments d'interruption de type relais vont devoir être réétudiés, de même que les alternateurs, et les conséquences d'un éventuel court-circuit sous 42V vont induire des changements dans les isolants et la nécessité de circuits MOSFETS de sécurité. 42V c'est effectivement une tension qui peut induire chez l'homme des effets sensiblement plus dévastateurs que 12V lors d'un contact malheureux.
Mais l'emploi
du 42V présente des avantages sérieux puisqu'à puissance
égale les courants sont réduits et donc les diamètres des
cables (réduction de coût), de même
on peut en attendre une diminution de près de 10% de la consommation
de carburant simplement parce que l'ignition sera plus complète. Mais
ce changement de tension impliquant la refonte complète des circuits
électriques et autorisant l'emploi de dispositifs électriques
ou électroniques plus puissants, on peut en profiter pour revoir totalement
les concepts de base de l'automobile.
Dans le module écologie nous consacrons un chapitre entier aux véhicules
hybrides et aux futurs moteurs à hydrogène.
un concept totalement innovant :
La puissance électrique installée grâce au 42V va permettre d'imaginer l'emploi de moteurs électriques pour contrôler l'orientation des roues. Il en résulte qu'on n'aura plus besoin de dispositif d'assistance hydraulique et par suite de colonne de direction avec la traditionnelle crémaillère. Le conducteur de la voiture de demain aura à sa disposition non plus un volant associé à des pédales et une boite de vitesses mécanique, mais une commande sans pédales s'inspirant de ce qu'on trouve actuellement sur les playstations, c'est à dire une commande comme en ont les avions de ligne depuis plus de quinze ans.
 .
.
C'est cette idée fondamentale qui a conduit le styliste Bertone associé à la compagnie SKF à concevoir pour le groupe Fiat un véhicule complètement nouveau baptisé Filo dans lequel toutes les commandes traditionnellement mécaniques (frein, direction) sont remplacées par une liaison filaire (doù le nom de Filo) avec des boutons de commande de type joystick au volant.
 .
.

Nous avions d'ailleurs proposé, au congrès SENSOR 2001, une solution proche pour réaliser la commande de direction des roues en éliminant la liaison mécanique entre le volant et celles-ci, en exploitant un capteur capacitif pour identifier la rotation du volant et un moteur sans balais pour assurer la stabilité directionnelle (maintien d'une trajectoire en ligne droite).
L'intérèt d'une commande électronique plutôt que mécanique est qu'elle peut facilement s'exercer différemment sur les deux roues. En effet les deux roues directrices d'un véhicule ont primitivement été considérées comme devant être sensiblement parallèles en permanence, c'est à dire que l'angle de chacune d'elle avec l'axe de la voiture était le même.
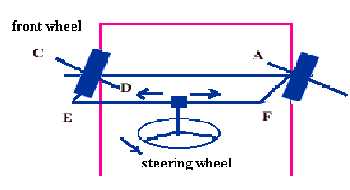
schéma
simplifié d'une direction à crémaillère classique
Or l'analyse géométrique élémentaire montre à l'évidence que la roue avant droite et la roue avant gauche d'un véhicule dans un virage ne peuvent suivre la même trajectoire, et ce d'autant plus que le virage est serré.
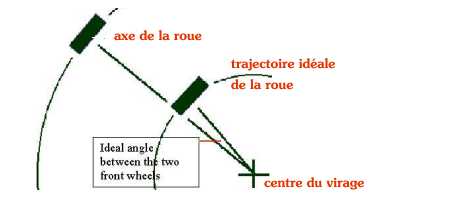
L'imposition du parallélisme induit donc nécessairement un glissement d'une roue par rapport à l'autre, glissement générant une usure du pneumatique et une moindre adhérence responsable parfois d'une perte de contrôle du véhicule par le conducteur. Dans les voitures modernes ce problème a été partiellement résolu par un mécanisme approprié (la biellette qui relie les roues avant pour les coupler lors d'un virage est plus courte que la distance entre les axes de roues). Cependant celui-ci n'est pas parfait et n'élimine pas totalement l'effet de glissement d'une roue par rapport à l'autre. Il suffit d'examiner les pneumatiques avant d'une voiture, peu avant de les changer, pour constater l'usure assymétrique résultant du phénomène de glissement, phénomène qui depuis la multiplication des rond-points à l'anglaise (que l'on peut assimiler à des virages serrés toujours dans le même sens) s'est suffisament accentué pour être décelable très facilement. Accessoirement les rondpoints à l'anglaise n'ont donc pas que des avantages puisqu'en accentuant la dissymétrie d'usure des pneumatiques ils favorisent la perte d'adhérence en virage serré. Notons par ailleurs que les chicanes, autre dispositif à la mode pour soit-disant ralentir les véhicules, indépendamment des risques qu'elles présentent par temps de brouillard, de neige ou de verglas, ont le même effet contraire à la sécurité à long terme.
En pilotant séparément les deux roues via une commande électronique on peut assurer l'orientation relative optimale de celles-ci à chaque instant. En outre la suppression de la colonne de direction permettra vraisemblablement de réduire les conséquences médicales pour le conducteur lors d'un accident frontal.
La suppression des pédales de frein et d'accélérateur relève de la même philosophie et aura les mêmes conséquences avantageuses en terme de sécurité.
![]() Notons cependant que cette révolution n'aboutira que lorsque les gouvernements
accepteront de modifier la réglementation qui impose la colonne de direction
et les pédales...ce sera peut-être l'obstacle
le plus difficile à franchir pour les constructeurs d'automobiles.
Notons cependant que cette révolution n'aboutira que lorsque les gouvernements
accepteront de modifier la réglementation qui impose la colonne de direction
et les pédales...ce sera peut-être l'obstacle
le plus difficile à franchir pour les constructeurs d'automobiles.
![]() Au Mondial de l'automobile de Paris (octobre 2002) on a pu voir plusieurs concept
cars qui reprenaient ces idées, en particulier le Citroën C-Airdream
qui dispose d'un volant multi-fonctions qui intègre les commandes de
radio, de passage de vitesse, d'accélération et de freinage, tandis
que la colonne de direction a disparu remplacée par une commande électronique.
Au Mondial de l'automobile de Paris (octobre 2002) on a pu voir plusieurs concept
cars qui reprenaient ces idées, en particulier le Citroën C-Airdream
qui dispose d'un volant multi-fonctions qui intègre les commandes de
radio, de passage de vitesse, d'accélération et de freinage, tandis
que la colonne de direction a disparu remplacée par une commande électronique.
Simultanément General Motors présente sa Hy Wire qui dispose d'un moteur électrique alimenté par une pile à combustible et dont toutes les commandes de direction et frein sont gérées électroniquement. Cependant dans les versions commercialisées en 2003 seule la pile à combustible est envisagée, les commandes électroniques ne seront intégrées dans les vrais véhicules que plus tard, ici encore pour des raisons de législation archaïque.
notre proposition d'assistance
En partant du principe que la direction assistée sera électronique et non plus hydraulique chaque roue sera pilotée séparément par le biais d'un moteur électrique pas à pas. Le moteur pas à pas présente en effet l'avantage de la précision.
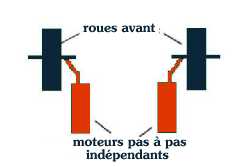
principe
de commande des roues
Le problème majeur dès lors que le volant est désolidarisé mécaniquement du mécanisme d'orientation des roues est de réaliser un dispositif capteur susceptible de repérer avec précision la position du volant, c'est à dire comment repérer un angle pouvant dépasser 360°. En effet actuellement, de butée à butée, le volant d'une voiture classique effectue trois tours et demi, les capteurs de position angulaire classiques (codeurs optiques) ne fonctionnent que sur 360° et dès lors qu'on leur demande une grande précision ces codeurs optiques sont d'un coût prohibitif incompatible avec ceux du domaine automobile.
Les potentiomètres à n tours ne sont pas exploitables non plus en raison du frottement du curseur. En effet statistiquement une voiture roule plus souvent en ligne droite, ce qui signifie que le capteur angulaire est majoritairement dans la position d'équilibre médiane. En fait le volant oscille très légèrement en permanence autour de cette position donc un capteur exploitant un contact en frottement aura une durée de vie trop réduite (quelques dizaines d'heures!). Il convient donc d'imaginer un capteur sans contact et dont les pièces reliées à l'électronique soient immobiles (comme dans un codeur optique), mais identifiant un angle de plus de 360° comme le ferait un potentiomètre multitours.
La solution que nous préconisons est de type capacitif. Elle s'insère autour d'un dispositif à vis sans fin solidaire du volant comme la traditionnelle crémaillère entrainant les roues, mais de dimensions très fortement miniaturisée puisqu'elle n'entrainera ici qu'un double mandrin de céramique métallisé. Ce cylindre métallisé en surface constituera l'électrode commune à deux condensateurs cylindriques coaxiaux, montés en série, dont les électrodes (1) et (2) seront des cylindres métalliques fixes. Ce dispositif est doublé (un de chaque côté du mécanisme à vis sans fin). Ainsi une rotation du volant entrainera par exemple l'ensemble de cet axe porteur des électrodes centrales vers la gauche. On voit sur la figure que les condensateurs (1) seront invariants tandis que les condensateurs (2) verront les surfaces d'électrodes en regard varier. Celui de gauche dans cet exemple va donc voir sa capacité augmenter tandis que celui de droite va diminuer. En insérant ces condensateurs dans un montage en pont on pourra récupérer un signal lié au sens et à l'importance de la rotation du volant.
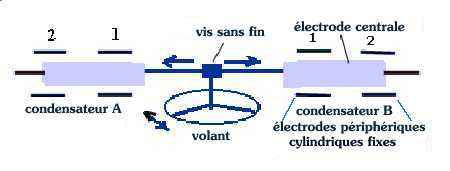
principe
du capteur de direction
La figure suivante représente le schéma basique du montage électronique associé. Après conversion le signal est envoyé vers un microcontrôleur qui en le comparant à une table élabore la commande distincte à envoyer à chaque moteur pas à pas.
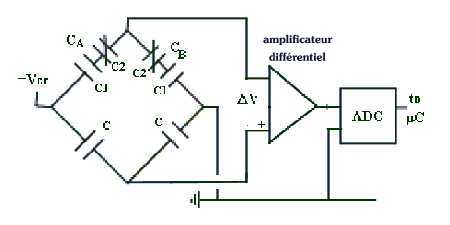
montage
en pont
L'un des problèmes résultant de la déconnexion mécanique entre le volant et les roues est le retour automatique en position médiane. Dans une direction classique ce sont les roues qui ont tendance à revenir en position médiane et qui ramènent donc automatiquement le volant dans cette position dès lors qu'on le lache. Ici les roues sont totalement indépendantes et le volant une fois laché reste dans la même position ce qui n'est évidemment pas du tout satisfaisant et totalement déroutant pour le pilote.
Il est donc indispensable d'envisager un dispositif qui va ramener automatiquement le volant à l'équilibre, d'une part, et qui, d'autre part, doit exercer une force croissante contraire à celle du conducteur lorsque celui-ci tourne fortement le volant (pour donner au conducteur sensiblement la même sensation que sur un système à crémaillère classique).
La solution est relativement simple et passe par le biais d'un moteur à courant continu sans balais monté sur le système à vis sans fin en opposition au volant. Dès que le volant s'écarte de la position médiane de repos le moteur sera soumis à une f.e.m. de rappel croissante avec l'écart. Un système PID classique permettra d'éviter les oscillations du volant et donc une trajectoire ondulante de la voiture.
Notons qu'avec ce système purement électronique on devrait obtenir de meilleurs résultats qu'avec les mécanismes d'aide hydraulique classiques, en particulier à grande vitesse (en effet on voit fréquemment à grande vitesse l'assistance hydraulique provoquer un léger pompage et donc une trajectoire oscillante). En outre ce mécanisme étant indépendant du moteur thermique de la voiture il fonctionne même à l'arrêt de celui-ci (ce qui est avantageux lorsqu'on est bloqué dans un bouchon dans une descente en virages : on peut arrêter le moteur - ce qui est d'ailleurs obligatoire dans certains Etats de l'Union Européenne - mais continuer à diriger sans effort la voiture. Il en est de même pour les manoeuvres à courte distance dans un garage).

En février 2014 les médias commencent à parler de l'éventualité d'ici quelques années de trouver sur le marché des voitures complètement autonomes et donc ne nécessitant pas de pilote à temps plein.
En fait tous les ingrédients pour assurer la conduite sécurisée sans pilote existent depuis de nombreuses années, mais les rassembler dans la voiture de Monsieur Toulemonde à un prix abordable était quasi impossible. Aujourd'hui avec les progrès en terme de miniaturisation de l'électronique et l'essor de la microinformatique ce challenge devient plus réaliste.
Mais quand j'entend les journalistes s'extasier devant une Renault autonome sur la piste d'essai du constructeur près de Rueil, comme s'il s'agissait d'un véhicule miraculeux, ça me fait bien rire. En effet au cours de l'été 1983, j'ai participé à Nuremberg au Salon et Congrès International bisannuel sur les capteurs, où des chercheurs germaniques du centre de recherche de la Bundeswehr, basé à Munich, nous ont présenté un véhicule se déplaçant sans conducteur et comportant dans son coffre un ordinateur gérant à la fois l'acquisition des données issues des capteurs et pilotant l'accélérateur, le freinage, la boite de vitesse, les feux et bien évidemment le volant. J'étais allé à Nuremberg au volant de ma voiture, et après le congrès je rentrai, par l'autoroute qui joint Nuremberg et Munich, autoroute où la circulation est toujours très dense. Soudain, alors que je roulais à 150km/h j'ai vu dans mon rétroviseur le véhicule qui m'avait été présenté deux jours plus tôt et ce véhicule me doubla allègrement mais j'eu quand même le temps de voir qu'il n'y avait effectivement pas de chauffeur et que le passager avant était en train de lire son journal, ce qui montre la confiance qu'il avait dans son prototype. Depuis l'amélioration a simplement consisté à miniaturiser l'informatique embarquée afin de libérer le coffre.
G. Reinhardt & al., amperometric multi-electrode sensors for NOx and hydrocarbons, SENSOR99, Nurnberg, mai 1999, Vol2, pp137-142.
W. Göpel, Sens. Actuators A 56 (1996) pp 83-.
W. Göpel & al., exhaust sensing with solid electrolytes: Quo Vadis?, SENSOR99, Nurnberg, mai 1999, Vol2, pp 125-130
H.Wunderlich & al., concepts and steps in the development of wireless sensors and actuators for automotive applications, SENSOR99, Nurnberg, mai 1999, Vol2, pp 157-162
W. Buff, saw sensors, Sens. Actuators (17),1989, pp 55-66
M. Goroll & al., New possibilities of SAW devices for passive remote sensing and identification,Progress in Electronic Research Symp., Nantes, p 419.
G. Scholl & al., RF powered wireless SAW Sensors,SENSOR99, Nurnberg, mai 1999, Vol2, pp 227-232
T. Truscott, a novell engine managment system based on intelligent control algorithms and utilizing innovative sensor technology, MST News, 2 (1999), pp 10-11.
D.E. Rickers,W. Gessner, Advanced Microsystems for Automotive Applications 99, Springer Verlag (Berlin), 1999.
D. Estève & al., L'intégration des systèmes électroniques dans l'automobile du XXIe siècle, Cépaduès Ed.(Toulouse), 1995.
D. Morrison, Communications Standard Drives Development of Vehicle Networks, Electronic Design, May 2000, Vol 48 (8), pp 26-28
D. Paret, le Bus CAN-Applications, Dunod Ed. (Paris), 1999.
HARMAZI M., BENSRHAIR A., BENNOUNA M., MICHÉ P., MOUSSET S. : "Implementation of a Real-Time 3D Vision Sensor for a Vehicle Driving Aid"; SETIT 2004, March 15-20, SOUSSE–TUNISIA, International Conference on Sciences of Electronics, Technologies of Information and Telecommunications; 7 p. en CD-ROM (2004)
LEFEE D., MOUSSET S., BENSRHAIR A., BERTOZZI M. : "Cooperation of Passive Vision Systems in Detection and Tracking of Pedestrians"; IEEE Intelligent Vehicles Symposium 2004, Parma, Italy, June 15-18, 2004; 4 pages en CD-ROM (2004)
MOUSSET S., TOULMINET G., BENSRHAIR A., MICHÉ P. : "Instrumentation d'un véhicule pour la détection d'obstacles routiers en temps réel"; Troisième Colloque Interdisciplinaire en instrumentation, C2I 2004, Cachan,France, 29-30 janvier 2004; 8 p en CD-ROM (2004)
MOUSSET S., TOULMINET G., BENSRHAIR A., MICHÉ P. : "Instrumentation d'un véhicule pour la détection d'obstacles routiers en temps réel"; INSTRUMENTATION, Aspect fondamentaux - Ouvrage collectif - HERMES - ISBN 2-7462-0827-X; pp 273-280 (2004)
| |
|
|