
Copyright
© 2000-2015
LHERBAUDIERE
10 pages à l'impression

18 mars 2013
|
Copyright |
10 pages à l'impression |
|
version initiale 2000 | |
| dernière
mise à jour 18 mars 2013 |
Logique séquentielle, bascules
| élément mémoire RS | la base de tous les autres | |||
| systèmes complexes | la machine de Moore | |||
| la synchronisation | une horloge en plus | |||
| bascules maitre-esclave | une double bascule | |||
| bascules à front | réduire les erreurs | |||
| mode data lock-out | ||||
| paramètres d'utilisation des bascules | à connaître | |||
| monostable | générer une impulsion | |||
| une collection d'icônes pour visiter tout le site | ||||
Dans les opérateurs booléens examinés précédemment l'état de sortie ne dépend que de l'état présent des entrées, c'est à dire que pour chaque état d'une combinaison d'entrée correspond une valeur toujours la même à la sortie. Nous allons maintenant examiner des systèmes dans lesquels une fonction mémoire va être ajoutée, et alors l'état des sorties dépendra à la fois de l'état actuel des entrées et des états passés.Nous aurons deux grands types de fonctionnement, soit la valeur des entrées est significative à tout instant, on parle alors de circuits asynchrones, soit elle n'est prise en compte qu'à des instants précis synchronisés par un signal d'horloge, on parle alors de circuits synchrones.
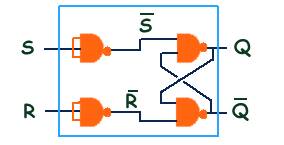
Elément mémoire RSConsidérons le circuit de base constitué dans son principe de deux portes NOR à deux entrées interconnectées comme sur le schéma ci-dessous. Rappelons que dans une porte NOR la sortie vaut 1 si aucune des entrées n'est à 1. On peut en déduire ce qu'on va appeler une table de vérité.
| R | S | Qt | Qt+1 | 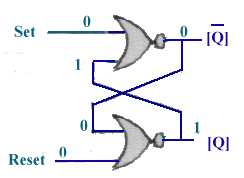 |
| 0 | 0 | 0 | 0 | |
| 1 | 0 | 0 | 0 | |
| 0 | 1 | 0 | 1 | |
| 0 | 0 | 1 | 1 | |
| 1 | 0 | 1 | 0 | |
| 0 | 1 | 1 | 1 | |
| 1 | 1 | cas interdit car conduisant à une indétermination | ||
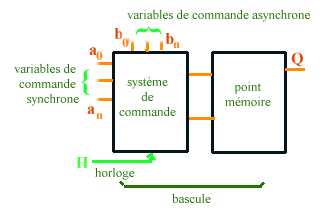
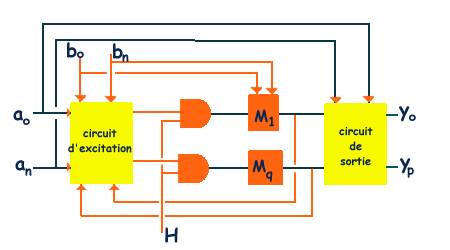
systèmes complexesIls sont réalisés en combinant des bascules, c'est à dire des systèmes combinant un élément mémoire RS et un système de commande.
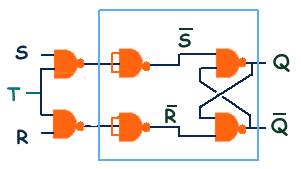
retour sur les bascules de mémorisation RSPlutôt que d'utiliser des portes NOR on choisira préférentiellement des réalisations à base de NAND de moindre coût de fabrication.
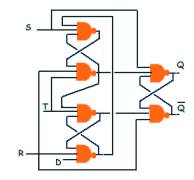
la synchronisationEn ajoutant sur S et R une entrée d'horloge T (via un ET) on va synchroniser le fonctionnement.
version RST
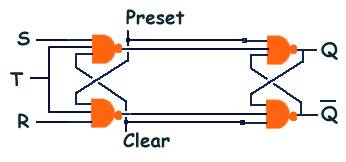
| S | R/td> | P | C | T | Q | |
| 0 | 0 | 1 | 1 | 1 | Q-1 | mémorisation |
| 0 | 1 | 1 | 1 | 1 | 0 | mise à 0 |
| 1 | 0 | 1 | 1 | 1 | 1 | mise à 1 |
| x | x | 0 | 1 | x | 1 | forçage à 1 |
| x | x | 1 | 0 | x | 0 | clear |
| x | x | 1 | 1 | 0 | Q-1 | verrouillage |
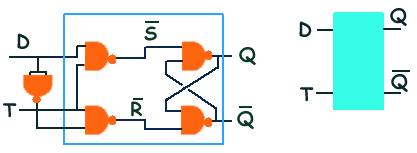
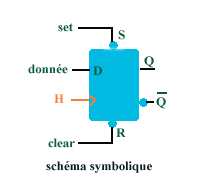
Bascule D à verrouillageC'est une RST où R et S sont complémentaires par construction.
|
D | T | Q | Q |
| 0 | 1 | 0 | 1 | |
| 1 | 1 | 1 | 0 | |
| x | 0 | Q-1 | Q-1 |
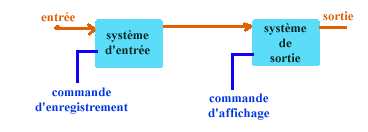
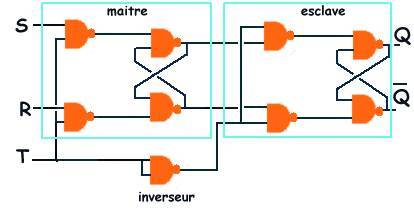
bascules de comptage/mode maître-esclavePour éviter que les parasites puissent modifier l'état de la sortie, il faudrait lorsque T = 1 que la sortie soit verrouillée, mais l'entrée ouverte et, pour T = 0, que l'entrée soit verrouillée. Cela implique une conception en deux parties selon le principe suivant.
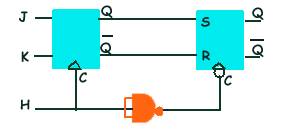
bascule JK/MEC'est une RST dont les sorties sont ramenées aux entrées via deux ET et qui dispose d'entrées asynchrones de mise à 1 ou à 0.
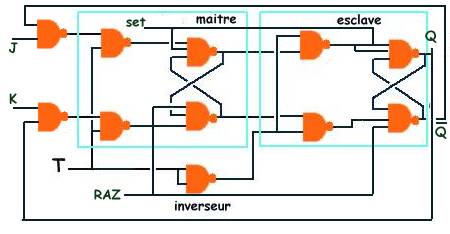
| J | K | T | Q | avec R=S=1 |
| x | x | 0 | Q-1 | verrouillage |
| 0 | 1 | 0 | mise à 0 | |
| 1 | 0 | 1 | mise à 1 | |
| 0 | 0 | Q-1 | mémorisation | |
| 1 | 1 | Q-1 | basculement |
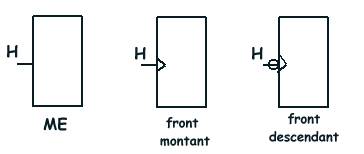
bascules fonctionnant sur front EDGE TRIGGEREDDans ce principe, la bascule prend en compte l'état des entrées uniquement au moment du changement d'état de l'horloge puis s'autobloque. On va rencontrer 2 types, celles fonctionnant sur front montant (ou positive edge triggered), et celles fonctionnant sur front descendant (negative edge triggered)
exemple de réalisation d'une RST à front montant
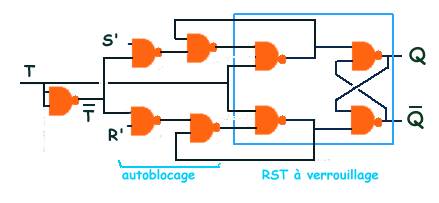
| S' | R' | T | Q | |
| x | x | 0 | Q-1 | verrouillage |
| 1 | 0 | 1 | mise à 1 | |
| 0 | 1 | 0 | mise à 0 | |
| 0 | 0 | x | Q-1 | mémorisation |
| 1 | 1 | 1 sur les 2 sorties , anormal à exclure | ||
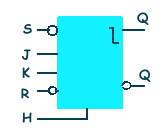
JK à front montantElle est conçue sur le même principe. C'est une RST à front montant à laquelle on a rajouté les 2 portes ET supplémentaires
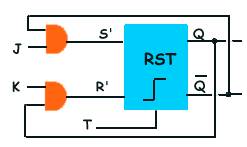 |
J | K | T | Q | |
| x | x | 0 | Q-1 | verrouillage | |
| 0 | 0 | x | Q-1 | mémorisation | |
| 0 | 1 | 0 | mise à 0 | ||
| 1 | 0 | 1 | mise à 1 | ||
| 1 | 1 | Q-1 | basculement |
bascule D à front
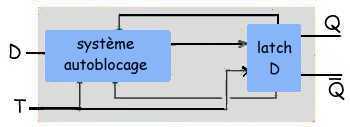 |
D | C | Q |
| 0 | 0 | ||
| 1 | 1 | ||
| X | 0 ou 1 | Q-1 |
mode data lock outC'est un système à fonctionnement différé. L'information est prise en compte sur le front montant de l'horloge, mais le résultat en sortie n'apparait qu'au front descendant.
paramètres d'utilisation des basculesOn prendra l'exemple numérique du circuit 74175 (4 bascules D avec RAZ)
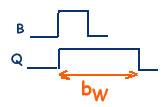
monostableIl s'agit d'une bascule avec un seul état stable.C'est un dispositif qui génère une impulsion, dont on peut régler la durée via un circuit RC, chaque fois qu'on le lui commande par la transition d'un signal sur son entrée.
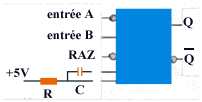 |
RAZ | A | B | Q | Q |
| L | x | x | L | H | |
| x | H | x | L | H | |
| x | x | L | L | H | |
| H | L | ||||
| H | H | ||||
| L | H |
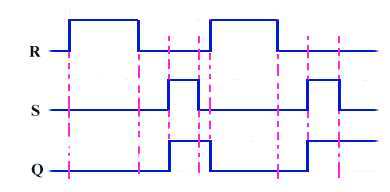
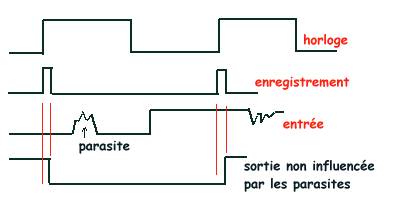
diagramme des temps
 |
|
 |