
Copyright
© 2000-2015
LHERBAUDIERE
3 pages à l'impression

version
initiale 2002
dernière
mise à jour
22 mars 2013
22 mars 2013
| |
Copyright |
3 pages à l'impression |
|
version
initiale 2002 |
|
| dernière
mise à jour 22 mars 2013 |
troisième partie : autres capteurs de déplacement (en cours de rédaction)
|
codage
direct |
||||
|
simplicité |
||||
|
mesure
sans contact |
||||
| une collection d'icônes pour visiter tout le site | ||||
codeurs optiques
La mesure de déplacements
linéaires ou angulaires est essentielle dans de nombreux systèmes
industriels, dans les robots aussi bien que dans la souris de votre ordinateur
et pour cela les codeurs optiques sont devenus très utilisés.
Ils utilisent la lumière et comportent donc systématiquement un
réseau numérique fixe sur lequel sont gravés
des pistes alternant les noirs et les blancs et un ou des émetteurs de
lumière, et un ou des récepteurs sur la partie mobile (ou l'inverse).
Ces dispositifs sont soit absolus
soit incrémentaux. Un dispositif
incrémental repérera une position à partir d'un point de
référence qui peut être défini optiquement aussi
bien que mécaniquement. Le problème principal rencontré
avec les dispositifs incrémentaux est qu'en cas de perte d'information
(pour quelque raison que ce soit) ils doivent revenir à leur point de
référence pour à nouveau fournir une information correcte,
tandis que les capteurs absolus ne sont pas concernés par ce type de
problème car ils fournissent une information binaire indépendante
de ce qui a pu se passer auparavant.
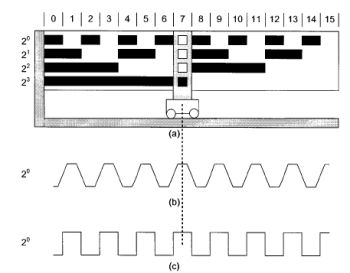 La
figure représente un codeur absolu linéaire capable de repérer
16 positions en exploitant le code binaire classique dans lequel le noir représente
un niveau 0 et le blanc un niveau 1. Pour cela il faut 4 pistes et la partie
mobile va supporter un ensemble de 4 émetteurs et 4 récepteurs
de lumière. Le chariot mobile est figuré en position 7. Précisons
qu'avec 4 bits on peut effectivement repérer 16 positions, mais qu'il
existe de très nombreuses autres combinaisons de piste permettant ce
repérage. En bas de la figure on a représenté le signal
transmis par le détecteur de niveau 20 lors du déplacement du
chariot et le signal carré obtenu avec un circuit de mise en forme adéquat.
Cependant en pratique ce n'est pas aussi parfait et lors d'une transition il
peut y avoir ambiguité générant un
état transitoire simulant une autre position.
La
figure représente un codeur absolu linéaire capable de repérer
16 positions en exploitant le code binaire classique dans lequel le noir représente
un niveau 0 et le blanc un niveau 1. Pour cela il faut 4 pistes et la partie
mobile va supporter un ensemble de 4 émetteurs et 4 récepteurs
de lumière. Le chariot mobile est figuré en position 7. Précisons
qu'avec 4 bits on peut effectivement repérer 16 positions, mais qu'il
existe de très nombreuses autres combinaisons de piste permettant ce
repérage. En bas de la figure on a représenté le signal
transmis par le détecteur de niveau 20 lors du déplacement du
chariot et le signal carré obtenu avec un circuit de mise en forme adéquat.
Cependant en pratique ce n'est pas aussi parfait et lors d'une transition il
peut y avoir ambiguité générant un
état transitoire simulant une autre position.
En effet un code binaire
simple n'est pas satisfaisant tout particulièrement pour un codeur angulaire
car on passera brutalement du code 0 au code 15, c'est pourquoi la majorité
des codeurs utilisent un code différent dit code
Gray qui présente l'avantage d'éviter les transitions
brutales ce qui augmente la fiabilité.
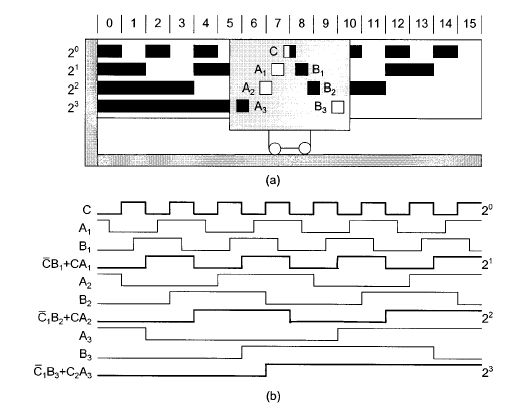
La figure suivante donne
un autre exemple de configuration (configuration en V ou vee-scan en anglais)
qui évitera les ambiguités. Il suffit alors de placer un réseau
logique combinatoire derrière le réseau de détecteurs pour
retrouver les codes binaires classiques ainsi que le montre la figure.
 préférera
le code Gray qui présente l'avantage d'être
préférera
le code Gray qui présente l'avantage d'être 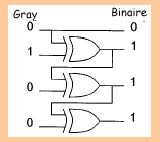 organisé
de telle sorte qu'un seul bit change à la fois quand on passe d'une position
à une autre ce qui élimine tout risque d'ambiguité du à
un état intermédiaire lié à la modification non
simultanée de plusieurs bits. La figure de gauche représente le
codage Gray tandis que la figure de droite représente le décodage
employé pour transformer le code gray lu en code binaire normal.
organisé
de telle sorte qu'un seul bit change à la fois quand on passe d'une position
à une autre ce qui élimine tout risque d'ambiguité du à
un état intermédiaire lié à la modification non
simultanée de plusieurs bits. La figure de gauche représente le
codage Gray tandis que la figure de droite représente le décodage
employé pour transformer le code gray lu en code binaire normal.
|