
Copyright
© 2000-2015
LHERBAUDIERE
3 pages à l'impression

version
initiale 2002
dernière
mise à jour
28 mars 2014
28 mars 2014
| |
Copyright |
3 pages à l'impression |
|
version
initiale 2002 |
|
| dernière
mise à jour 28 mars 2014 |
deuxième partie : autres capteurs de déplacement, présence ou proimité
|
variation
de reluctance |
||||
|
méthodes
sans contact |
||||
|
Michelson |
||||
|
mesure
de temps de vol |
||||
| une collection d'icônes pour visiter tout le site | ||||
 Pour suivre un déplacement angulaire
sans aucune limitation du nombre de tours on peut exploiter le phénomène
d'induction. L'idée est relativement simple elle exploite une variation
de champ magnétique dans un bobinage selon le principe figuré
ci-contre.
Pour suivre un déplacement angulaire
sans aucune limitation du nombre de tours on peut exploiter le phénomène
d'induction. L'idée est relativement simple elle exploite une variation
de champ magnétique dans un bobinage selon le principe figuré
ci-contre. 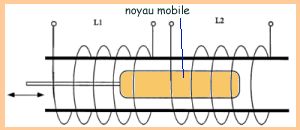 Un déplacement
linéaire peut aussi être mis en évidence par un procédé
Un déplacement
linéaire peut aussi être mis en évidence par un procédé
 inductif. On utilise alors deux bobinages
à l'intérieur desquels un noyau unique est susceptible de se déplacer.
Quand le noyau est en position de référence les deux inductances
sont identiques, dès lors qu'il se déplace d'une quantité
dl l'une des inductances va augmenter de
inductif. On utilise alors deux bobinages
à l'intérieur desquels un noyau unique est susceptible de se déplacer.
Quand le noyau est en position de référence les deux inductances
sont identiques, dès lors qu'il se déplace d'une quantité
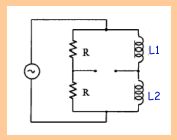
dl l'une des inductances va augmenter de  L
et l'autre diminuer symétriquement de L.
En plaçant l'ensemble dans un montage en pont on va donc récupérer
un signal d'amplitude liée au déplacement du noyau.
L
et l'autre diminuer symétriquement de L.
En plaçant l'ensemble dans un montage en pont on va donc récupérer
un signal d'amplitude liée au déplacement du noyau.
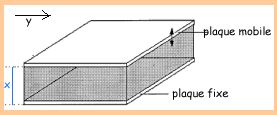 condensateur plan
d'épaisseur x. L'une des armatures, de surface A, est fixe, tandis que
l'autre peut se déplacer en liaison avec le dispositif dont on veut suivre
le mouvement tout en restant parallèle à l'armature fixe.
condensateur plan
d'épaisseur x. L'une des armatures, de surface A, est fixe, tandis que
l'autre peut se déplacer en liaison avec le dispositif dont on veut suivre
le mouvement tout en restant parallèle à l'armature fixe. 2
sera différente de celle 1
de l'air, la mesure de la capacité sera un indicateur du niveau y du
liquide.
2
sera différente de celle 1
de l'air, la mesure de la capacité sera un indicateur du niveau y du
liquide. 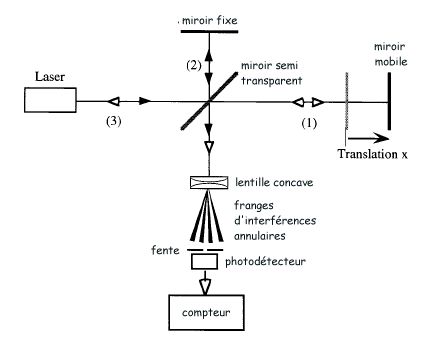
 /512 ce qui en utilisant
un laser He-Ne émettant à une longueur d'onde de 633nm conduit
à une résolution proche du nanomètre.
/512 ce qui en utilisant
un laser He-Ne émettant à une longueur d'onde de 633nm conduit
à une résolution proche du nanomètre. capteurs
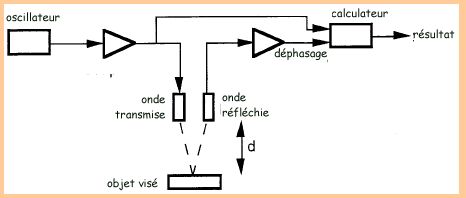
à ultrasons à mesure de temps de vol
Lorsqu'une onde ultrasonore traversant un milieu donné rencontre un
autre milieu elle est partiellement réfléchie d'où l'idée
d'exploiter cet écho pour identifier la distance parcourue sachant
que dans le milieu d'épaisseur d l'onde se déplace à
une vitesse c et met un temps t pour effectuer le parcours aller-retour d'où
la relation élémentaire d = ct/2
 En pratique on
peut utiliser directement ce principe lorsque la distance à mesurer
est inférieure à la longueur d'onde de l'onde ultrasonore. Pour
les distances plus grandes on préfère en général
moduler le faisceau émis en fréquence. La dérive de fréquence
du faisceau réfléchi est alors proportionnelle au temps de vol
c'est à dire à la distance. Cette procédure est robuste
vis à vis des perturbations et permet de détecter les multiréflexions.
Cependant il faut se méfier car une distance très grande et
une autre beaucoup plus faible peuvent conduire au même déphasage
apparent.
En pratique on
peut utiliser directement ce principe lorsque la distance à mesurer
est inférieure à la longueur d'onde de l'onde ultrasonore. Pour
les distances plus grandes on préfère en général
moduler le faisceau émis en fréquence. La dérive de fréquence
du faisceau réfléchi est alors proportionnelle au temps de vol
c'est à dire à la distance. Cette procédure est robuste
vis à vis des perturbations et permet de détecter les multiréflexions.
Cependant il faut se méfier car une distance très grande et
une autre beaucoup plus faible peuvent conduire au même déphasage
apparent.
Pour éliminer les bruits provenant de sources industrielles (tels les
systèmes à air comprimé par ex.) on a recours à
des méthodes de corrélation. Les signaux parasites n'étant
pas corrélés avec le signal émis par le système
de mesure peuvent aisément être éliminés.
Ce type de principe peut
être utilisé dans les radars chargés
de piéger les automobilistes trop pressés, mais aussi dans les
systèmes de sécurité chargés de détecter
la présence d'un individu dans une zone
interdite ou au voisinage d'une habitation et pilotant parfois l'allumage
d'un spot d'éclairage. Ainsi dans une agglomération il est possible
de réduire la consommation d'éclairage public dans une voie
piétonne en dotant les lampadaires d'un tel système qui permettra
l'allumage quand un piéton arrive à une certaine distance du
lampadaire et l'extinction quand le piéton sort de ladite zone. On
peut même moduler la puissance de l'éclairage en fonction de
la distance entre le piéton et le lampadaire ce qui est d'autant plus
aisé lorsque ce dernier est équipé de diodes led beaucoup
plus résistantes sur la durée à ce type de comportement
qu'une ampoule à incandescence.
| |
|